数采计划
该页面用于展示和管理数据采集(数采)任务的计划详情,支持按多种条件筛选、查看和操作计划数据。
功能说明
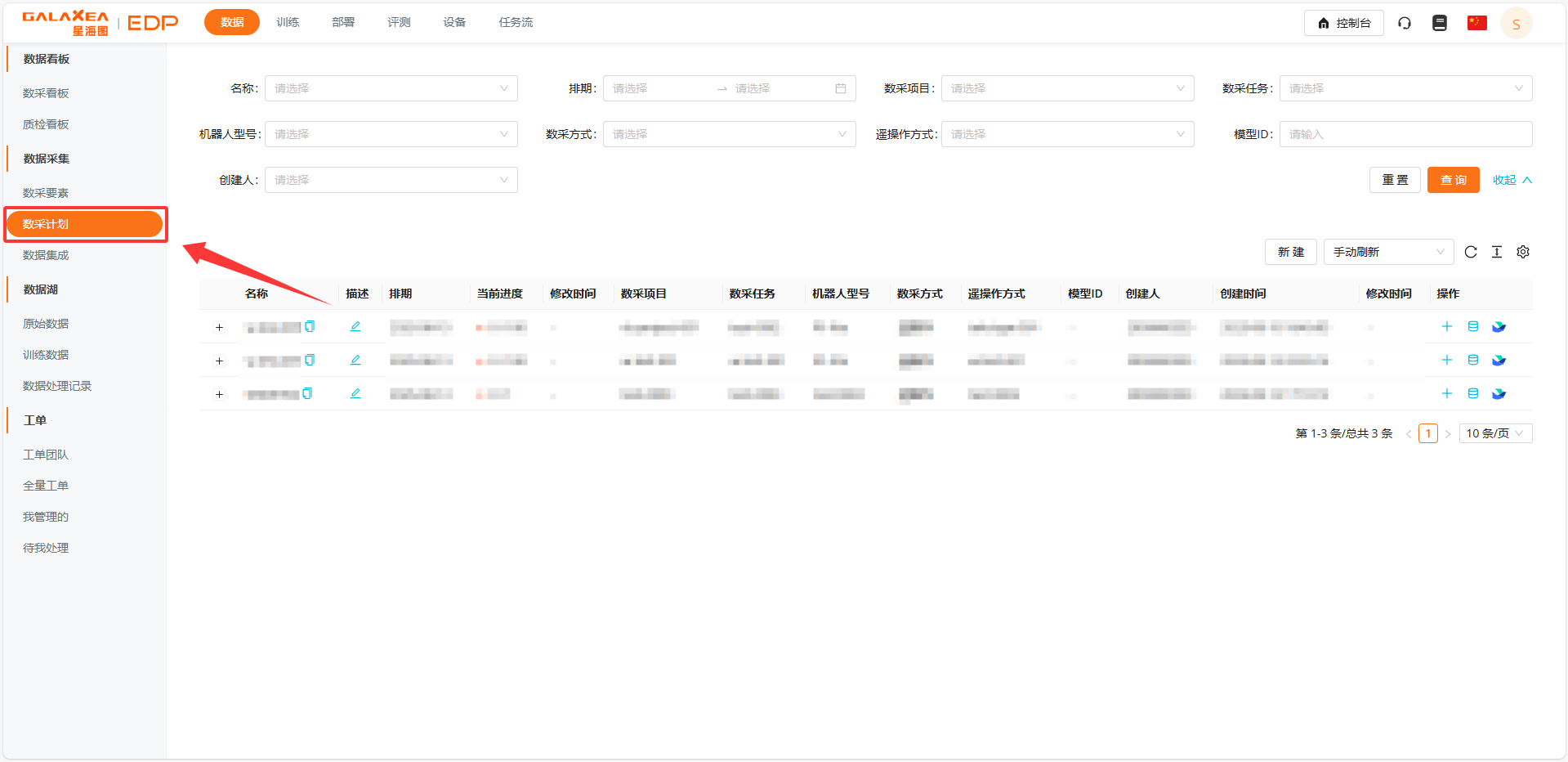
1. 打开页面
进入“数采计划”页面,即可看到所有已有的数据采集计划。
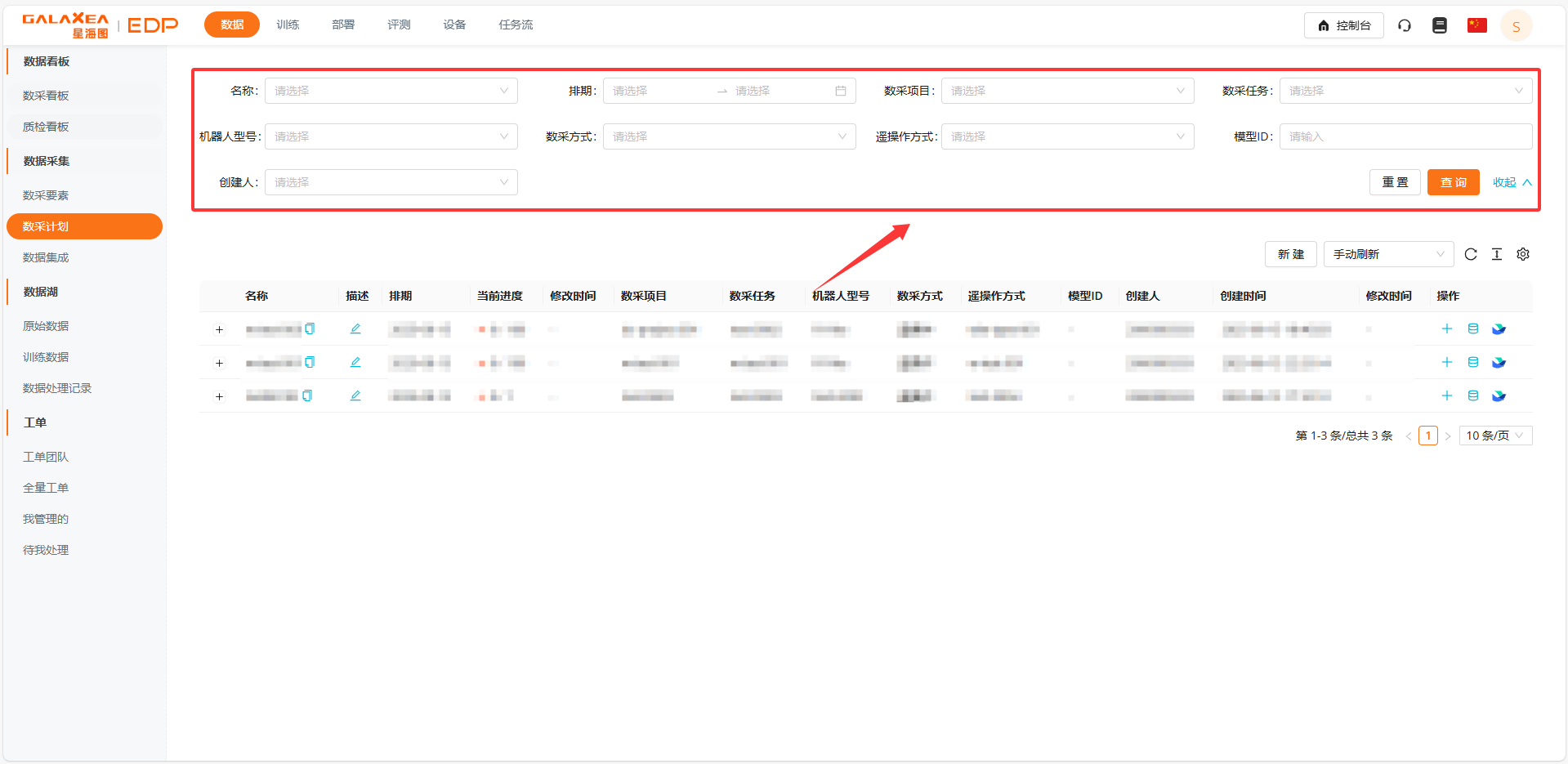
2. 根据条件筛选数据
页面顶部提供多个筛选条件,便于用户快速定位特定的数据采集计划,支持以下筛选项:
- 名称
- 排期(时间范围)
- 数采项目
- 数采任务
- 机器人型号
- 数采方式
- 遥操作方式
- 模型ID
- 创建人
点击“查询”按钮以应用筛选条件,点击“重置”按钮清除当前筛选条件。
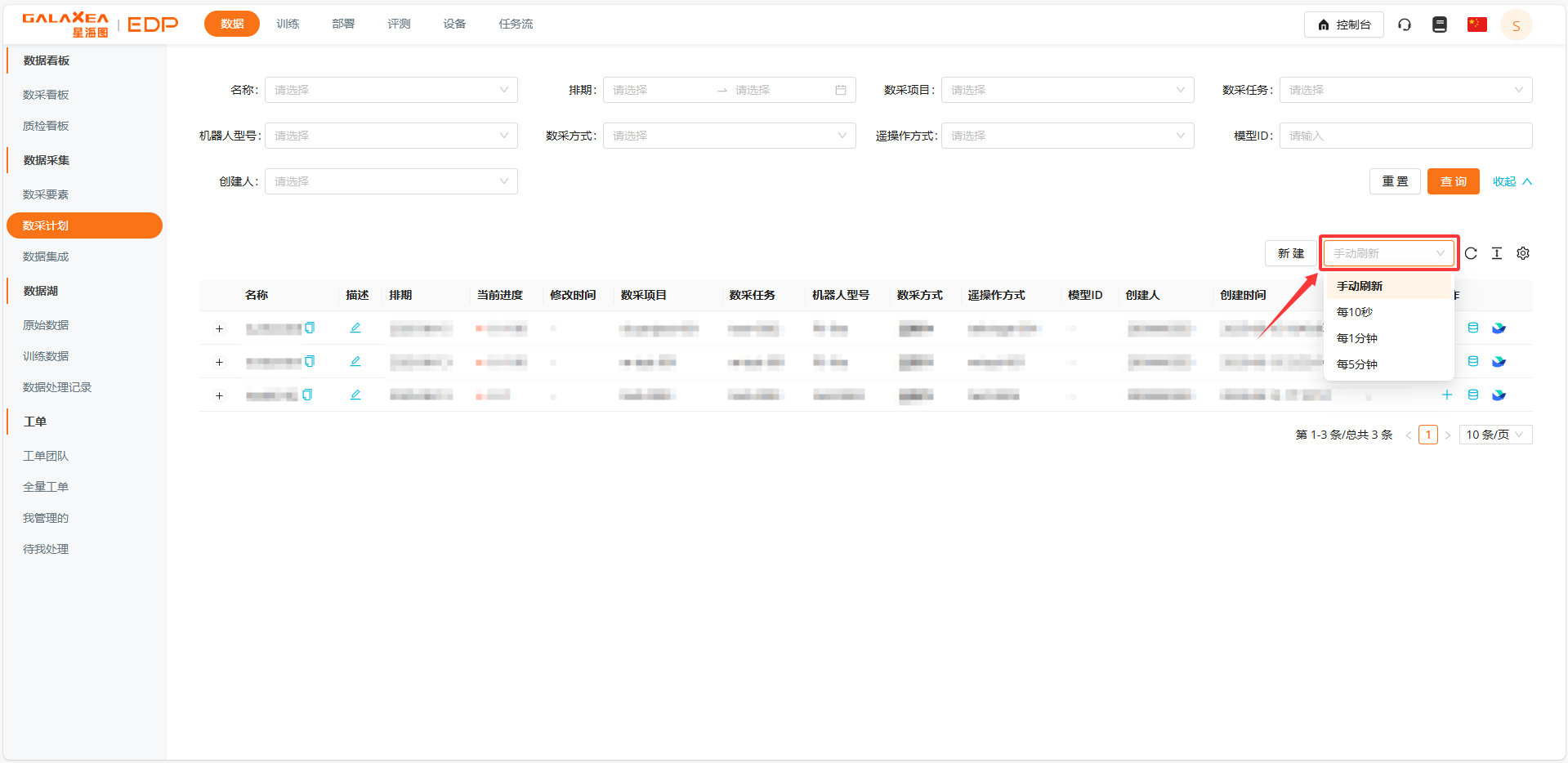
3. 刷新数据
点击右上角刷新图标,可手动刷新页面数据,获取最新进展情况。

当然,您也可以通过点击 手动刷新 按钮,来设置自动刷新周期。
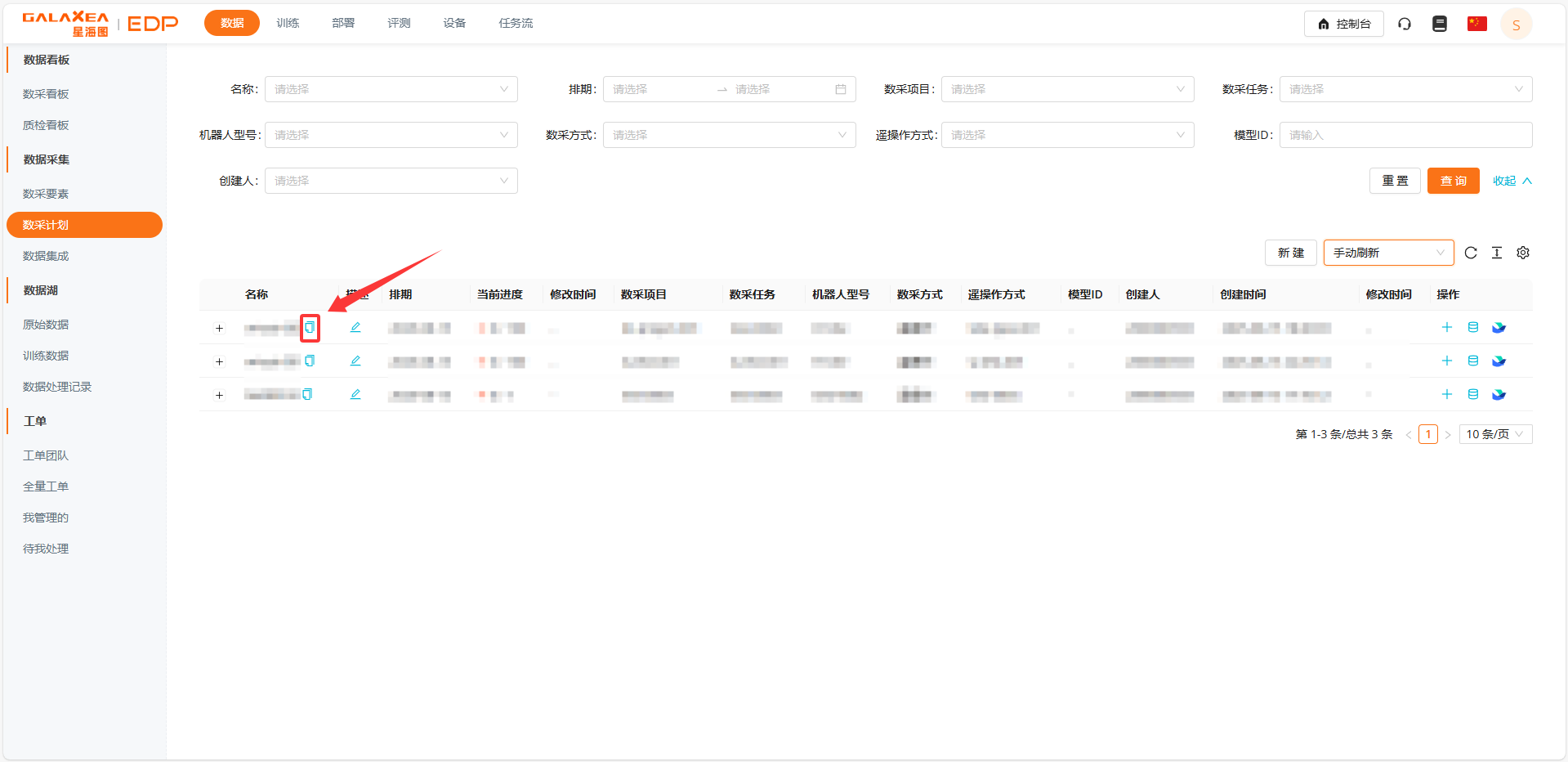
4. 复制计划名称
每条计划右侧提供复制按钮,点击可快速复制当前计划的名称,便于粘贴使用。
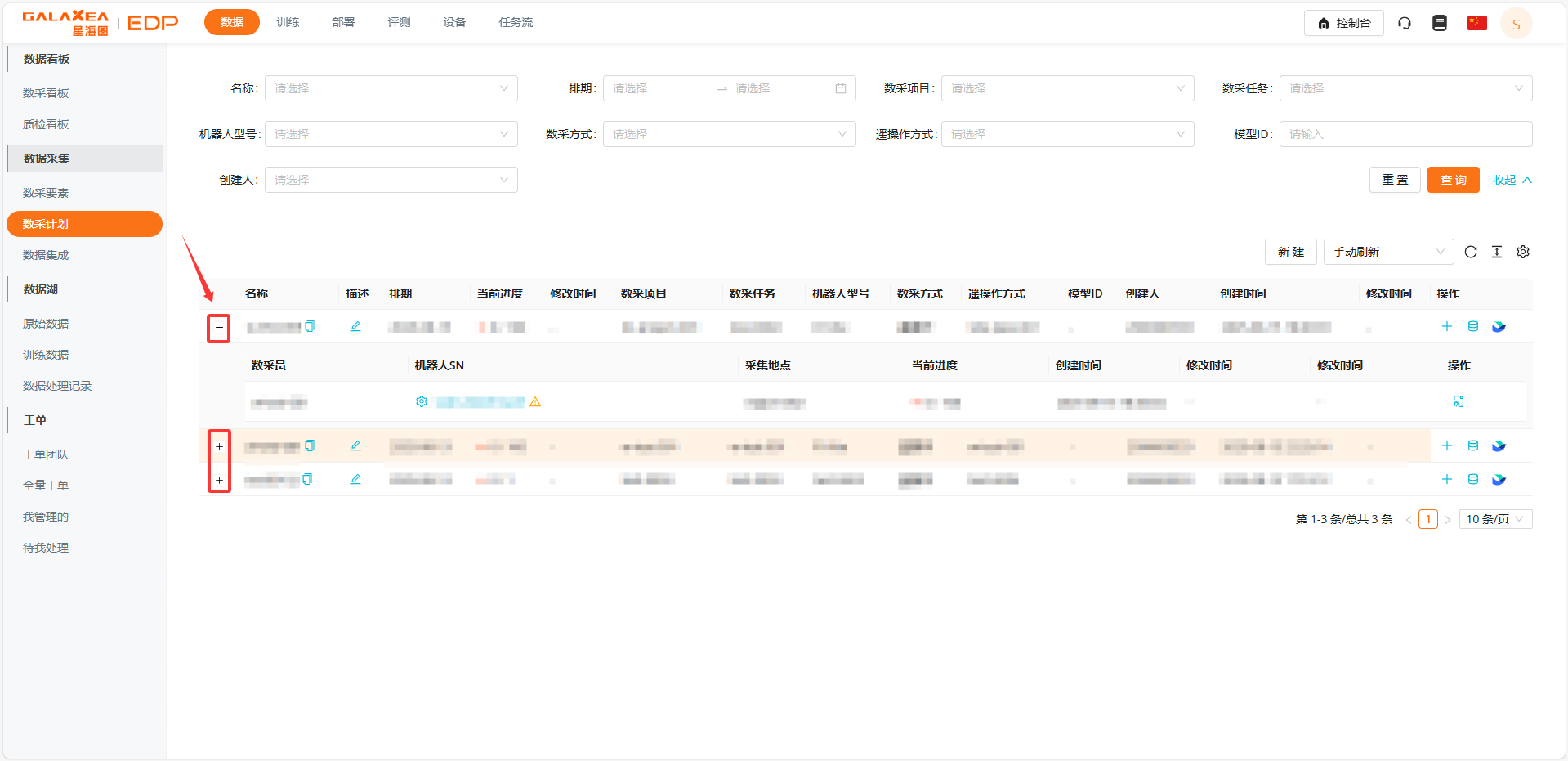
5. 查看详情
点击某条计划左侧的“+”可展开查看该计划的详细信息,包括任务明细、进度等。
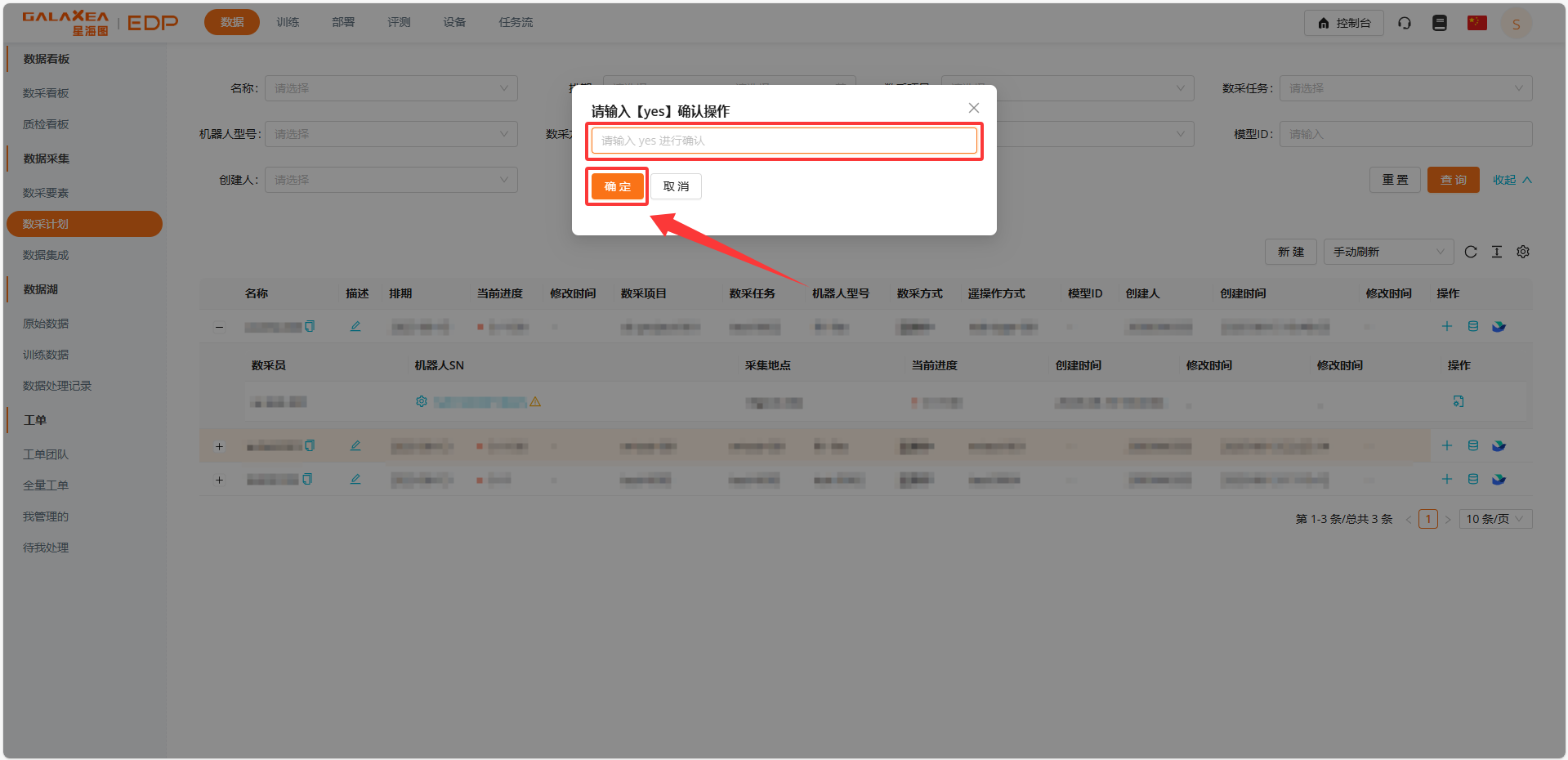
6. 生成机器人数采配置
点击“生成机器人数采配置”按钮,可生成当前计划对应的机器人执行配置。
在详细信息中,可以点击 操作栏中的按钮,来生成数采配置。
 在点击之后,需要输入 yes 来确认此操作。
在点击之后,需要输入 yes 来确认此操作。
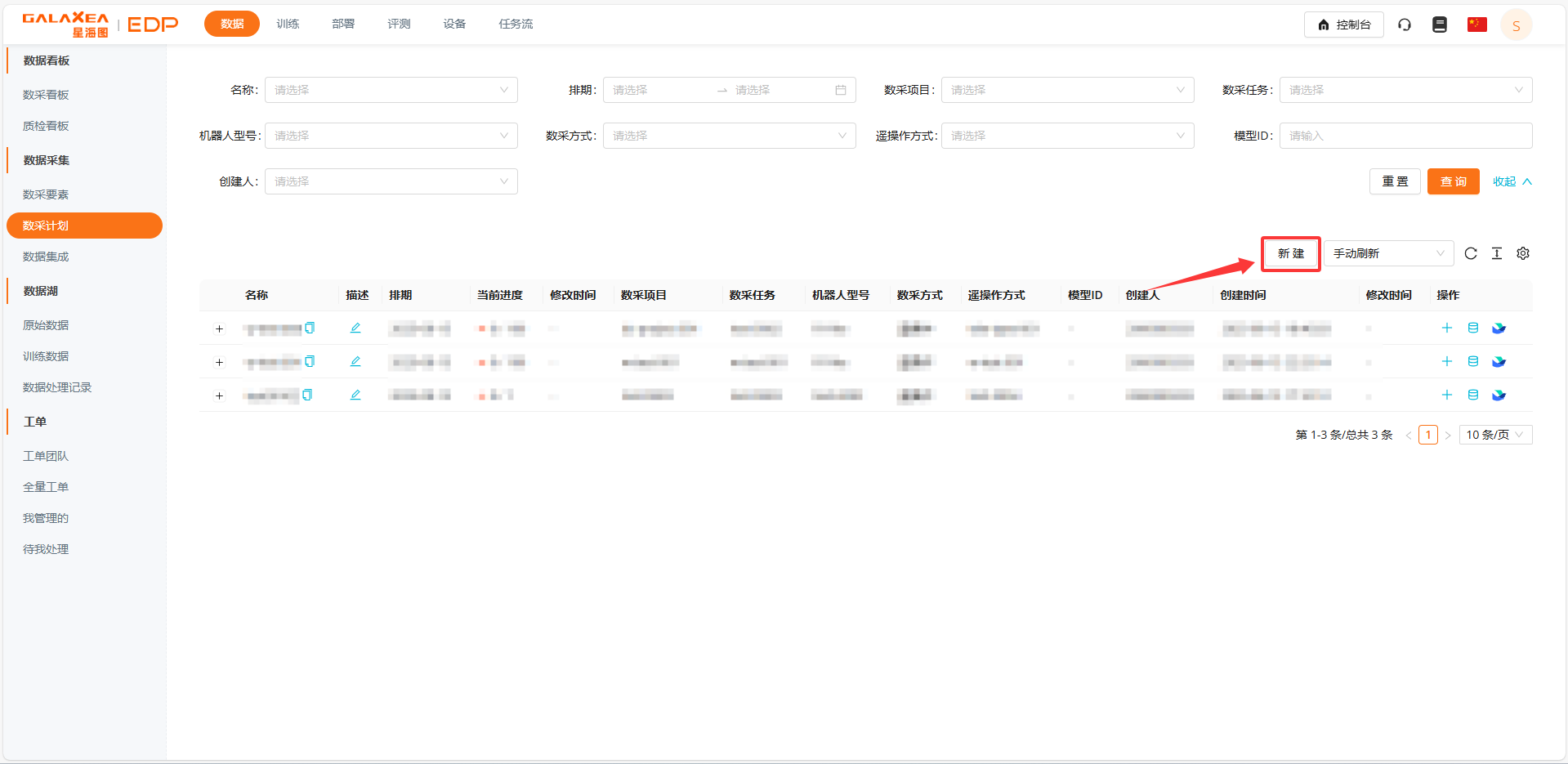
7. 新建计划
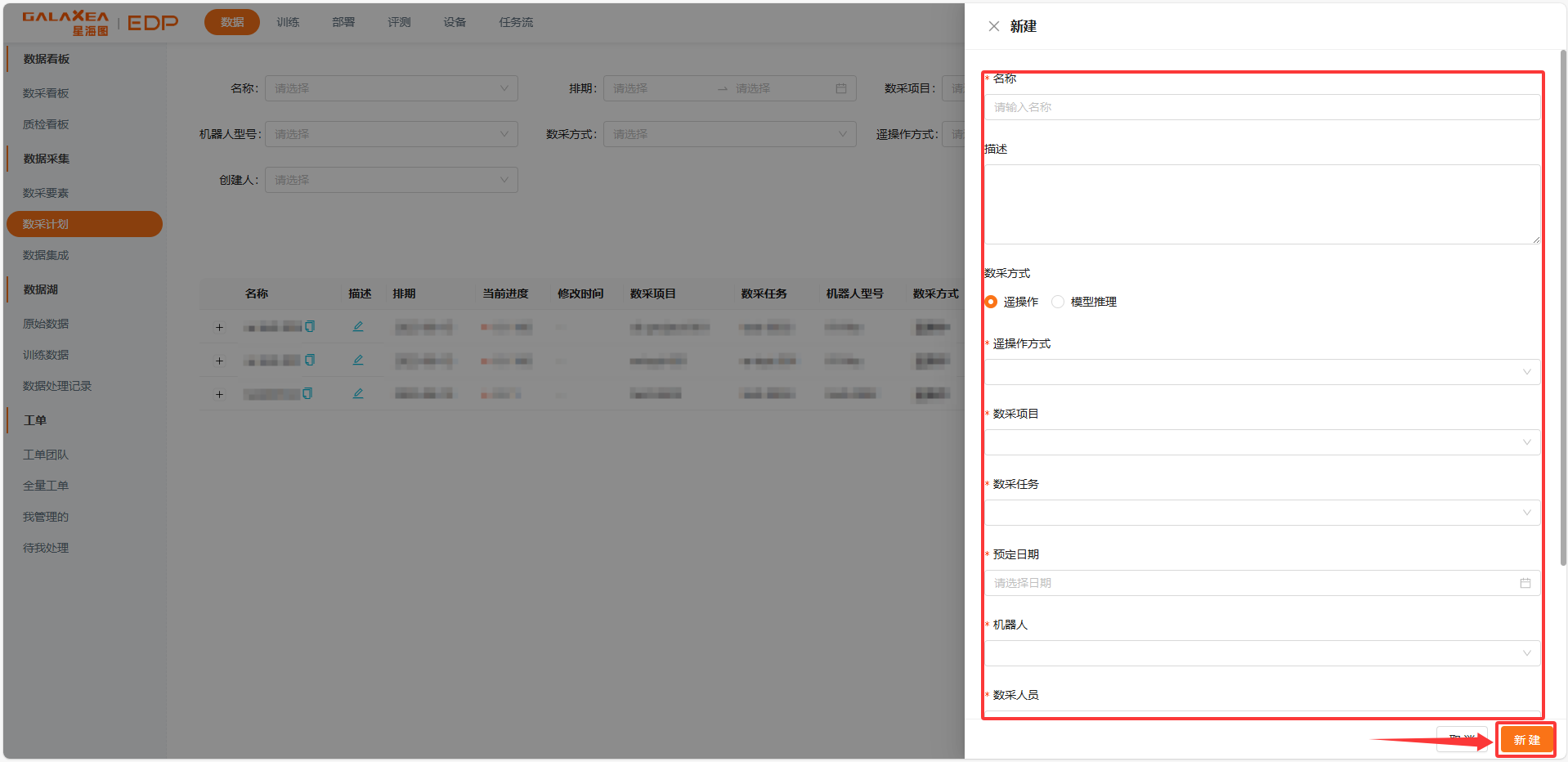
- 点击右上角新建按钮,进入计划创建流程,可新增一条数采计划。
- 填写相关的信息,点击 保存按钮,即可新建完成。
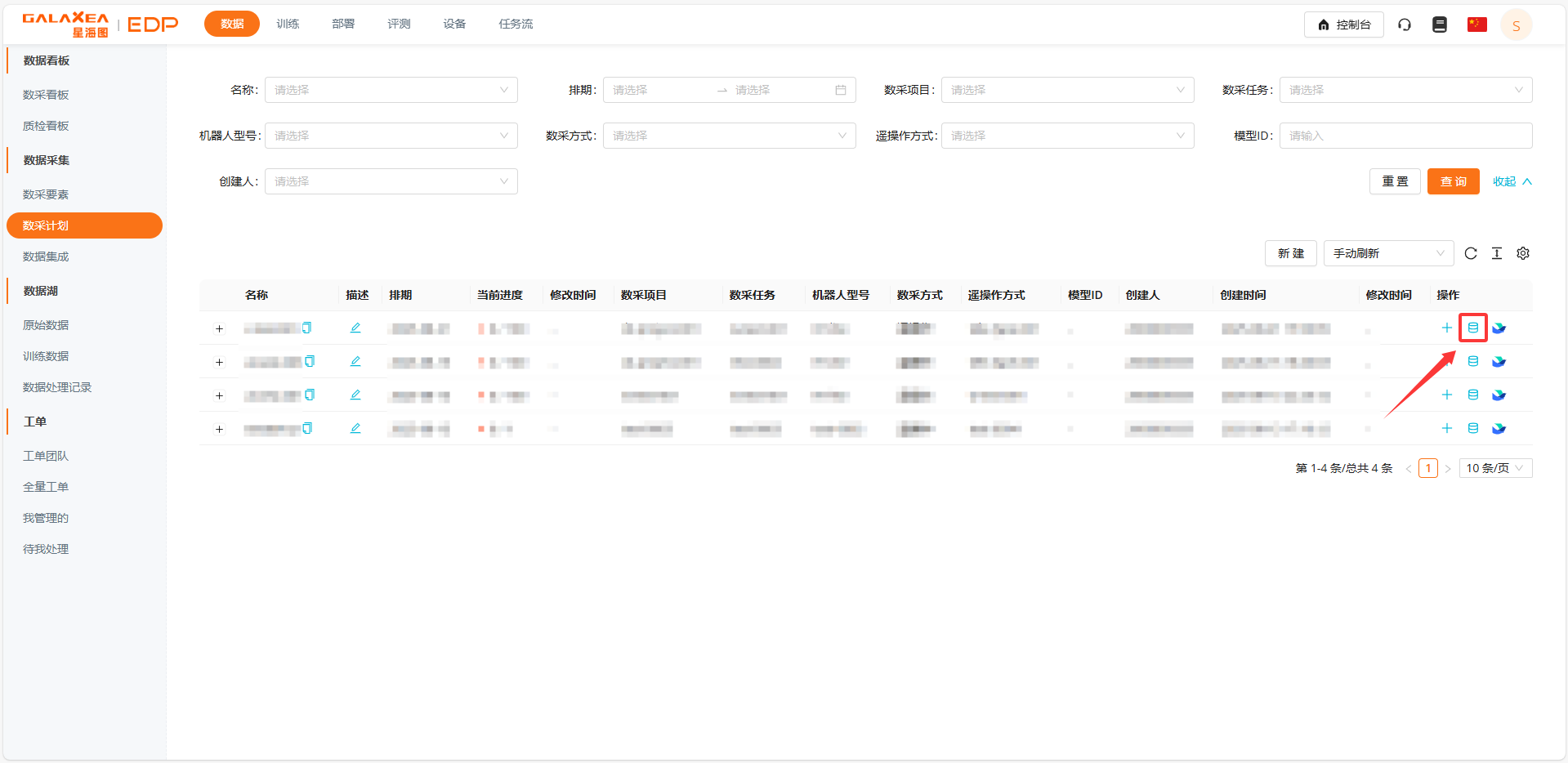
8. 查看关联数据
点击操作栏中的第二个图标,可进入该计划的关联数据详情页面。
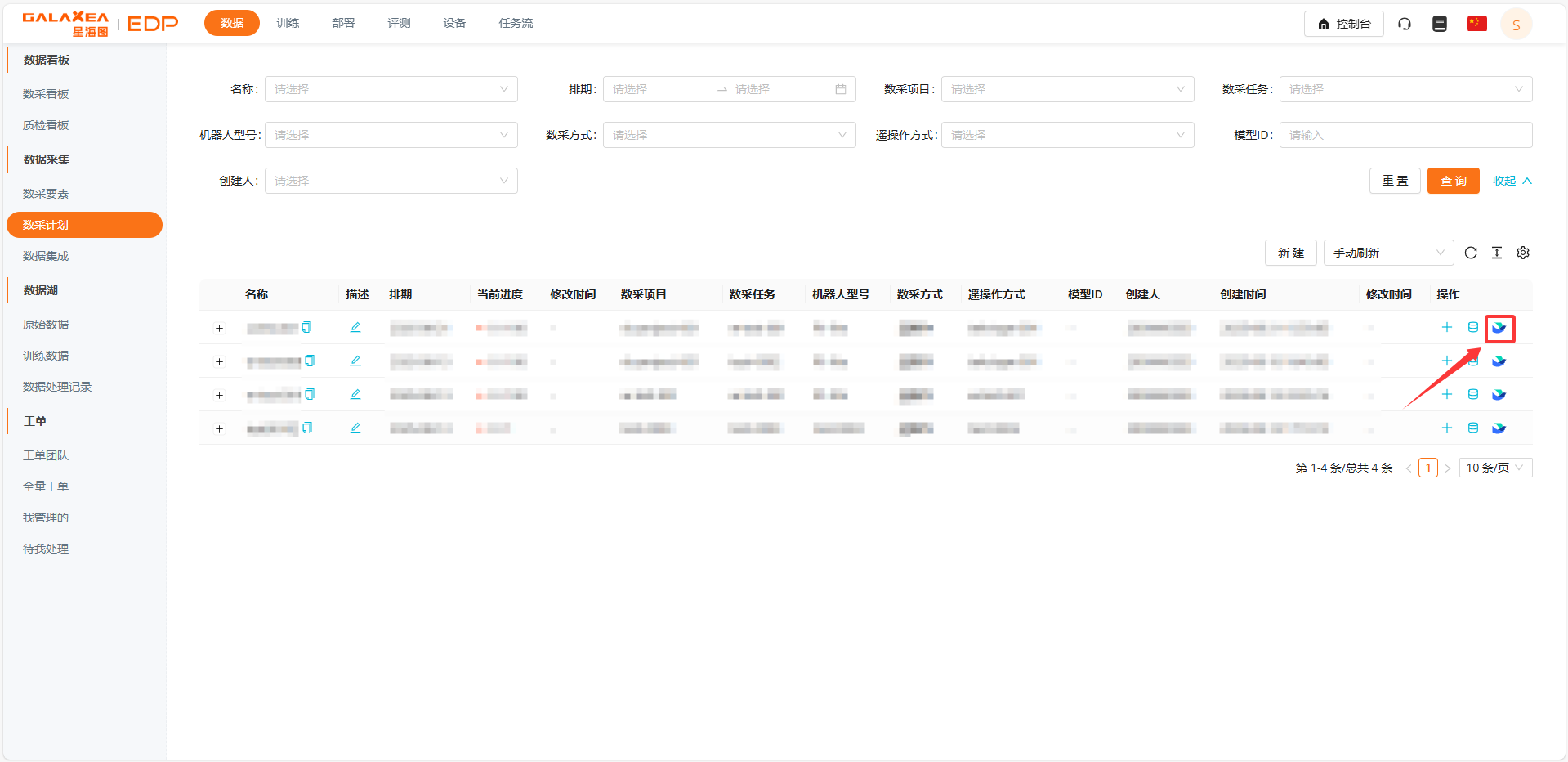
9. 公布计划
计划准备完毕后,可通过点击操作栏中的第三个图标,飞书公布计划功能将其设置为可执行状态,供机器人执行或他人查看。
数据列字段说明
| 字段 | 描述 |
|---|---|
| 名称 | 数据采集计划的名称 |
| 描述 | 简要说明计划内容 |
| 排期 | 计划的执行时间(日期) |
| 当前进度 | 已完成任务数 / 总任务数 |
| 进度更新时间 | 最近一次更新任务进度的时间 |
| 数采项目 | 所属的数据采集项目 |
| 数采任务 | 当前采集任务的具体名称 |
| 机器人型号 | 执行该计划所用的机器人型号 |
| 遥操作方式 | 操作类型,如 VR 或 gello |
| 创建人 | 发起该计划的用户 |
| 创建时间 | 该计划的创建日期 |
| 操作 | 提供复制、查看、创建子计划等操作按钮 |
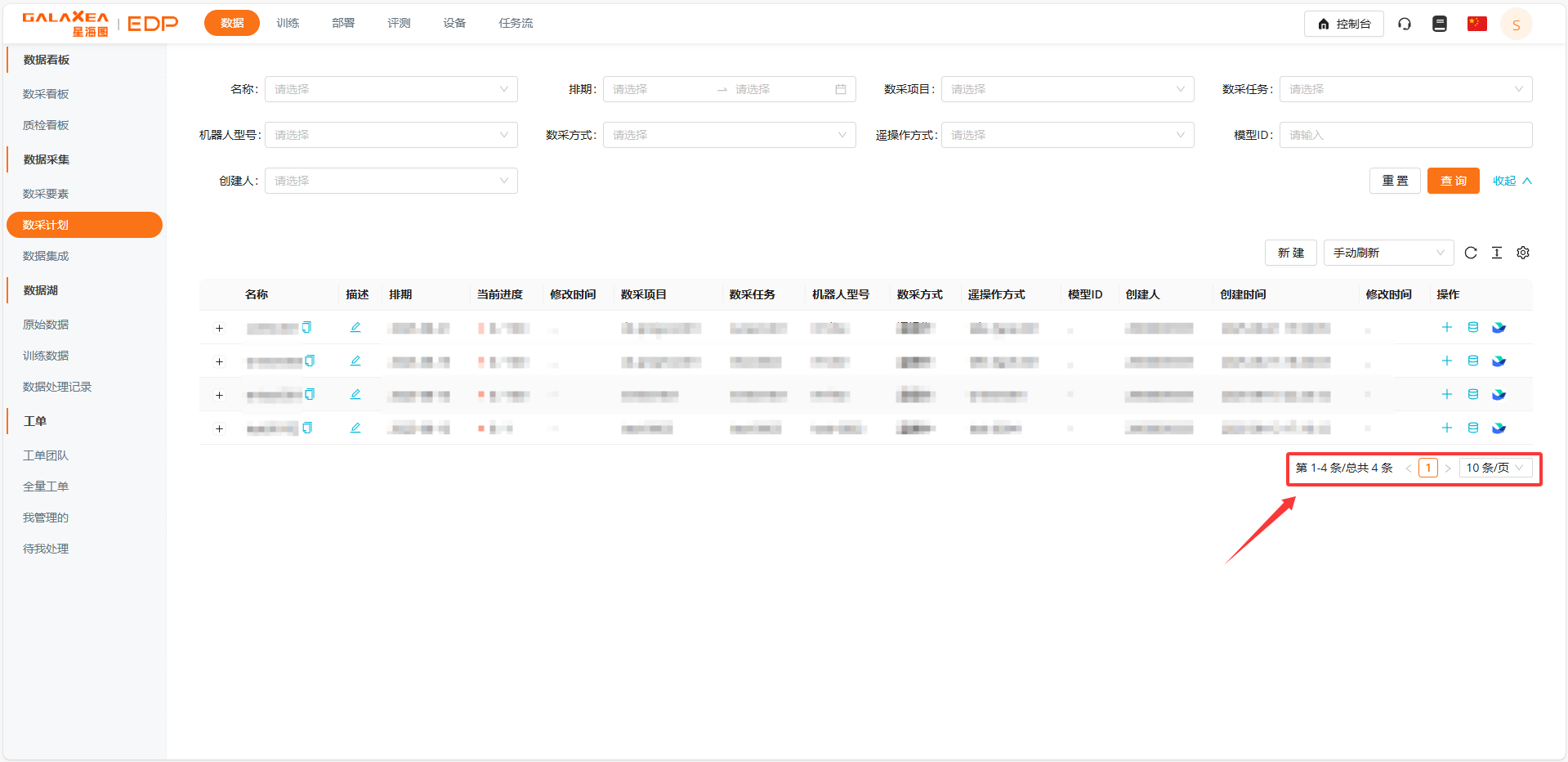
切换分页/设置页大小
点击表格右下角的分页控件,可切换查看不同页的数据;也可设置每页显示的数据量(默认10条/页)。表格右下方会显示数据总量及当前页的展示范围。
本文档适用于理解“数采计划”页面的基本结构与功能,如需技术细节请参考开发文档或联系系统管理员。